2023-09-15
來源(yuán):南(nán)陽防爆
(版權(quán)歸原作者或機構所(suǒ)有(yǒu))
一、振動的測量
振動值有三(sān)種表達形(xíng)式(shì):振動位移、振(zhèn)動速(sù)度、振(zhèn)動(dòng)加(jiā)速度。
在低(dī)頻(f<10hz)範圍内(nèi),一(yī)般以測(cè)量振動位移為(wéi)主,因為低頻範(fàn)圍内造成破(pò)壞的主(zhǔ)要因素是(shì)應力的(de)強度,位移量是與應變(biàn)、應力直接相關(guān)的參(cān)數。
在(zài)中頻(f=10~1000hz)範圍内,一(yī)般以(yǐ)測量振動速度(dù)為主,因為(wéi)部件的疲勞進程與(yǔ)振動(dòng)速度成正(zhèng)比,振動能量與(yǔ)振動(dòng)速度的平(píng)方成(chéng)正(zhèng)比。在這(zhè)個範圍内,零件(jiàn)主要表現為疲(pí)勞破壞(huài),如(rú)點蝕(shí)、剝落等。
在高頻(pín)(f>1000hz)範圍(wéi),一般(bān)以測量振(zhèn)動速度為(wéi)主。因(yīn)為(wéi)加(jiā)速度(dù)表征部件(jiàn)所受沖擊力的(de)強度(dù)。沖擊力的(de)大小(xiǎo)與沖擊(jī)的(de)頻率(lǜ)和加速(sù)度值正相關。
根(gēn)據(jù)測量位置(zhì)的不(bú)同又(yòu)分為軸振動和(hé)座振(zhèn)動。對(duì)于電(diàn)機,一般測(cè)量(liàng)軸承座(zuò)振(zhèn)動速度和位(wèi)移的有效值,以及(jí)軸振動(dòng)位(wèi)移的峰峰值(zhí)。具體的測量位(wèi)置按gb10068或其它相(xiàng)關标(biāo)準。
型式試(shì)驗時,應測振動位移(yí)和振動速(sù)度值,檢查試驗時,對(duì)于600rpm以下的(de)電機隻需(xū)測座振動(dòng)位移(yí),600~15000rpm的電(diàn)機(jī)隻需測座振動速度。
對于滑(huá)動軸承且轉速(sù)大于1200rpm、額(é)定(dìng)功率(lǜ)大于1000kw的電機,有(yǒu)必要測量軸振(zhèn)動位移。特别是撓性轉(zhuǎn)子(zǐ)電機(jī),更推薦(jiàn)測(cè)量軸(zhóu)徑向(xiàng)振(zhèn)動位移(yí)。
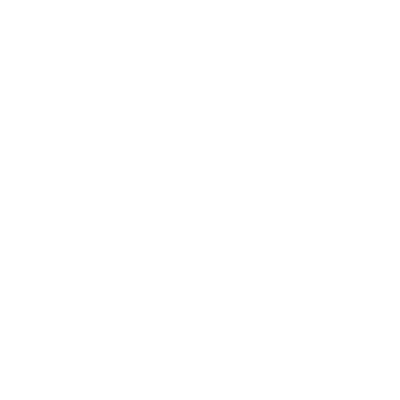
二、電機出廠振(zhèn)動考核(hé)标準
gb/t10068規(guī)定了對(duì)于(yú)中心(xīn)高56mm及以(yǐ)上個、功(gōng)率50mw及以(yǐ)下、轉速為(wéi)120~15000rpm的直流電機(jī)和三(sān)相(xiàng)交流(liú)電(diàn)機,在脫離開任(rèn)何負載和(hé)原動(dòng)機、在規定條件(jiàn)下(xià)對(duì)規定的位置進行工廠驗(yàn)收振動測(cè)量時(shí)的考核(hé)值(zhí)。如下(xià)表所(suǒ)示。
一台電(diàn)機,自身平衡較(jiào)好且振動強(qiáng)度(dù)等級(jí)符合gb/t10068的要求,但(dàn)在現場安(ān)裝中因地基不(bú)平、負載機械的(de)反作用以及(jí)電(diàn)源中(zhōng)的紋(wén)波電(diàn)流的影響等各(gè)種因素,也會引(yǐn)起較大的振動(dòng)。另外,由(yóu)于所驅(qū)動的(de)各單元的(de)固有頻率與電機旋轉體微小(xiǎo)殘(cán)餘(yú)不平衡量(liàng)的激勵頻率極(jí)為接(jiē)近,也(yě)會引起振動(dòng)。
三、電機在用(yòng)戶現場的(de)振動考核——座振(zhèn)
電機在(zài)用(yòng)戶現場的(de)振動(dòng)考核(hé)可按gb/t6075.3執行(háng),該标(biāo)準規定了額定(dìng)功率大(dà)于15kw、額定(dìng)轉速120~15000rpm的機(jī)器,在非旋(xuán)轉(zhuǎn)部(bù)件上(shàng)測量評價(jià)振動(dòng)。适用(yòng)于額(é)定工(gōng)作(zuò)轉速内、穩定(dìng)運行工況,在機(jī)器軸(zhóu)承、軸承座(zuò)或機座(zuò)上現場(chǎng)進行的寬頻帶振(zhèn)動測量。該标(biāo)準對機器分為(wéi)兩組:
1組——額定功(gōng)率>300kw且(qiě)<50mw的大型機(jī)器;軸中心高≥315mm的電機。這類機器(qì)通常采用(yòng)滑動(dòng)軸承(chéng),轉速範圍(wéi)較寬,從(cóng)120rpm到(dào)15000rpm。
2組——額定功率>15kw但≤300kw的中(zhōng)型機(jī)器;軸(zhóu)中心(xīn)高>160mm但≤315mm的電機。這(zhè)類機(jī)器通(tōng)常采(cǎi)用滾動軸承且(qiě)運行轉速超過(guò)600rpm。
對指定方向的(de)支承部(bù)件(jiàn)柔度(dù)分為(wéi)剛(gāng)性(xìng)支承(chéng)和柔性支(zhī)承。在測量(liàng)方向(xiàng)上機(jī)器與支承系統(tǒng)組合的最低(dī)固(gù)有頻(pín)率(lǜ)至少大(dà)于主(zhǔ)激勵頻率(lǜ)25%,則認為在(zài)該方(fāng)向為剛(gāng)性支承(chéng),否則為柔(róu)性支(zhī)承。
在連續運行監測(cè)時對主要受徑向載荷的(de)軸承通常(cháng)不作(zuò)軸向振動測量(liàng)。一般隻對(duì)具有(yǒu)推力軸承的情(qíng)況下進行測量。
機器振動(dòng)危害(hài)程度的評估有(yǒu)兩種方法,一種是根據機器軸承的允(yǔn)許(xǔ)值,以(yǐ)及(jí)通過支承結(jié)構和基礎傳遞至周圍環境的(de)允許(xǔ)值的(de)絕對(duì)數值來評(píng)定。另一種是根(gēn)據振(zhèn)動值(zhí)的變化(huà)來評定。簡單(dān)說就(jiù)是絕對(duì)值法和相對(duì)值法兩種(zhǒng)。
1、絕對值法(fǎ)
對振(zhèn)動值的評價分為4個區(qū)域(yù):
區域(yù)a:新交(jiāo)付(fù)的機器的振(zhèn)動通(tōng)常落(luò)在該(gāi)區域。
區城(chéng)b:機器振動處在(zài)該區域通(tōng)常認(rèn)為可(kě)無限制長期運(yùn)行。
區城c:機(jī)器振動處在該(gāi)區域一般不适宜作長(zhǎng)時間連續運行(háng),通常機器可(kě)在(zài)此(cǐ)狀态下運行有限時(shí)間,直到有采(cǎi)取(qǔ)補救(jiù)措施的合(hé)适時機(jī)為(wéi)止。
區(qū)域d:機(jī)器(qì)振動處(chù)在該區(qū)域通常(cháng)認為其(qí)振(zhèn)動烈(liè)度足以導(dǎo)緻機器損(sǔn)壞(huài)。
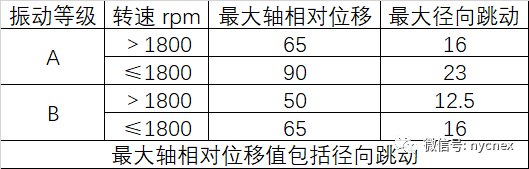
abcd各(gè)區域(yù)的分界點數值(zhí)見下(xià)表:
指定的(de)區域邊界值并(bìng)不專門作為驗(yàn)收規範(fàn),驗收規範應(yīng)由機器制(zhì)造商與用戶之(zhī)間的協(xié)議(yì)決定。然而(ér),這些數據(jù)作為(wéi)指南可避(bì)免過大(dà)的缺陷或(huò)不(bú)切(qiē)實際的(de)要求(qiú)。在(zài)某些情況下(xià)機器可能(néng)有特殊(shū)性能,要求采用不同的(de)區域邊(biān)界值(更(gèng)高或更低),在這(zhè)種情況下(xià),通常要求機器制造(zào)商必(bì)須說明其(qí)理(lǐ)由,并且要特(tè)别确保機(jī)器在較高(gāo)振動值下(xià)運行不會(huì)損壞(huài)。
2、相對值法
振動(dòng)值(zhí)可能(néng)出(chū)現明(míng)顯的(de)變化,這些(xiē)變化能(néng)夠(gòu)瞬間(jiān)産生(shēng)或(huò)随時間而逐(zhú)漸發(fā)展,并(bìng)可(kě)能預(yù)示(shì)早期(qī)的損壞或一些其它(tā)問(wèn)題。故即(jí)使未達(dá)到(dào)上表(biǎo)中的c區,也應采取措施。
當(dāng)振動(dòng)量值的(de)變(biàn)化超(chāo)過區(qū)域(yù)b上(shàng)?的25%(一(yī)般值(zhí),對(duì)于具體(tǐ)的機(jī)器可根據(jù)經驗采取其它(tā)數值)時(shí),認為是(shì)有明顯變化,特(tè)别是如(rú)果(guǒ)它突然發(fā)生,此時宜開始進行診斷(duàn)研究查明(míng)變化(huà)的原因,并确定(dìng)下一步(bù)适當的(de)措施(shī)。
三、電(diàn)機在(zài)用戶現場的振(zhèn)動考核——軸振
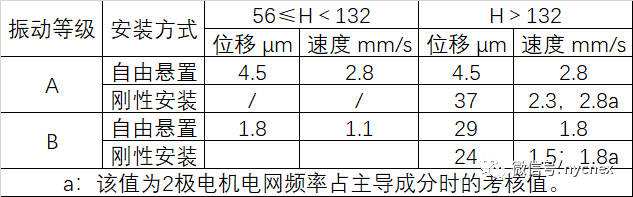
通(tōng)常隻有1000rpm及以上(shàng)具有(yǒu)滑動軸承的電(diàn)機考核軸(zhóu)振。軸(zhóu)振的(de)允許(xǔ)值與(yǔ)軸(zhóu)的(de)轉速相關(guān),标準推薦(jiàn)的abcd區域(yù)邊(biān)界如(rú)下:
a/b區(qū)域邊(biān)界:4800/k
b/c區(qū)域邊界(jiè):9000/k
c/d區域邊(biān)界:13200/k
k為轉速(sù)(rpm)開根号數值,即(jí)k=n^0.5。
由此(cǐ)可得,對于(yú)常見(jiàn)的轉速,對應的(de)邊界見下表:
由于軸振和座(zuò)振(zhèn)之間的關系沒有簡單的方法來确定,因(yīn)此當(dāng)同時(shí)測座振和(hé)軸振時(shí),應(yīng)以更(gèng)嚴格(gé)的區域等(děng)級來評(píng)估機器(qì)的振(zhèn)動(dòng)狀态。
四(sì)、用戶現場的振(zhèn)動保護值設置(zhì)
報警(jǐng)值:警(jǐng)告振(zhèn)動已(yǐ)達(dá)到(dào)規定(dìng)的值或顯著的變化已發生,可(kě)能需要采(cǎi)取(qǔ)補(bǔ)救措(cuò)施。通(tōng)常發生報警情況後,機器可繼續運行一(yī)段(duàn)時間,同(tóng)時應(yīng)進行診斷(duàn)研究以确定振(zhèn)動變(biàn)化(huà)的原因(yīn)并制定補(bǔ)救措施。
停機值:規定(dìng)某一(yī)振動(dòng)量值,超過該值(zhí)機器(qì)繼續運行可能會引(yǐn)起損壞。如超(chāo)過停機值應(yīng)立即采取措(cuò)施(shī)以減小振動或(huò)停機(jī)。
基線值:機(jī)器正常穩(wěn)定運(yùn)行時(shí),在規定位(wèi)置和方向(xiàng)測得的最大振(zhèn)動值。機器運(yùn)行(háng)一段(duàn)時間之(zhī)後才能(néng)獲得(dé)基線值。
報(bào)警值通常是相(xiàng)對于(yú)基線(xiàn)值來(lái)設定(dìng)。
建(jiàn)議(yì)設定(dìng)的報警限值比基線(xiàn)值高出b區(qū)上限的 25%。如(rú)基線(xiàn)值較低(dī)時(shí),則報(bào)警值可能(néng)在c區(qū)之下。
對一台新(xīn)機(jī)器,沒有基線(xiàn)值,則初始報警(jǐng)值設定宜以其(qí)他類似機器的(de)經驗為基礎,或(huò)以同意的驗收(shōu)值為基準。經過(guò)一段(duàn)時(shí)期,建立(lì)穩态基(jī)線(xiàn)值後(hòu)再相(xiàng)應調整報警值(zhí)。建議(yì)報警(jǐng)限值(zhí)通常不超(chāo)過b區上限的1.25倍(bèi)。如果(guǒ)穩(wěn)态基線(xiàn)值變(biàn)化(例(lì)如機器檢修後),宜相(xiàng)應地(dì)修(xiū)改報警(jǐng)值。
停機值(zhí)一般都相同(tóng)并(bìng)且通(tōng)常與(yǔ)基線值無(wú)關。但是,對于不同設(shè)計的機(jī)器(qì)停機值會(huì)有差(chà)異。通(tōng)常,停(tíng)機值(zhí)在c區或d區(qū)内。建議停機值不應(yīng)超過(guò)c區上限的(de)1.25倍。
掃碼添(tiān)加微信
蔡(cài)經理(lǐ)
手機: